ABSTRACT
Example Harmonic and
Anharmonic Oscillators Demonstrated and Analyzed
I easily modified a commercially
available teaching apparatus
to make spring and magnetic “hardening” oscillators. That apparatus is demonstrated with
position (time) data collected and graphed. Simple approximate fits reveal the character of their
dissipations in addition to the anharmonic oscillator's expected period
variation and transition to harmonicity.
Phase plotting makes the latter especially obvious. I also numerically modeled the spring
oscillator with a simple leapfrog algorithm using the force constant found
experimentally.
Introduction
While studying the motion of a
spring oscillator cart supported pendulum, I noticed the cart’s interesting
behavior when nearing the magnetic bumpers I had used as spring fixtures. I realized, with some improvement, I
would have a useful hardening oscillator.
After developing that apparatus, I made a similar Hookian one for
comparison and presented both at the most recent SCAAPT meeting at CSUCI.
The Apparatuses
Both oscillators consist of low
friction carts running on a track.
The linear (spring) oscillator uses similar springs stretched between
the cart and hooks in wood blocks clamped to adjustable brackets fastened to
the track to supply the restoring force.
The hardening (magnetic repulsion) oscillator uses cylindrical magnets
mounted in the cart and in wood bumpers bolted to the track to supply its
restoring force. The carts’ masses
plus bolted steel cubes supply the necessary inertias. The position of the carts is determined
by a linearized rotary motion sensor (optical encoder). The RMS is fastened to a bracket bolted
to the track. A heavy thread loop
clamped to the cart, looped over the RMS’s pulley, and a small pulley on a
bracket at the opposite end of the track transmits the motion of the cart to
the RMS. The two adjacent
photographs illustrate the preceding.

Plate One, The Hookian (linear
spring) Oscillator
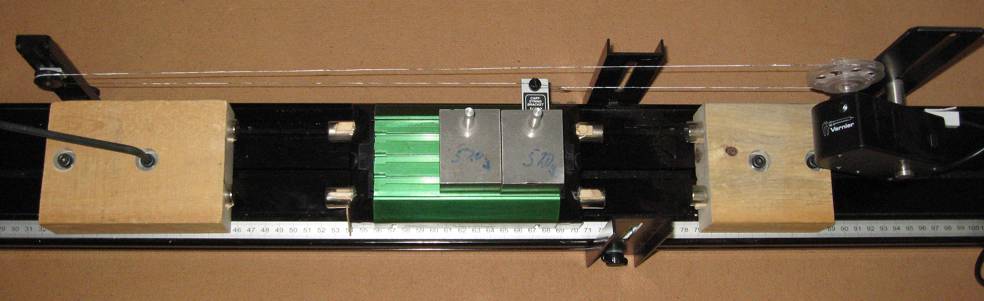
Plate Two, The Magnetic
(non-linear hardening) Oscillator
Note: All of the commercial apparatus is from Vernier, except the
cart clamp, pulley and its bracket, which are from Pasco. I salvaged the eight magnets from
linear generator powered flashlights from RAFT. I shimmed the magnets to prevent their movement, because I’d
used RTVR for easy removal.
Data Collection and Display
I used Vernier’s LabQuest
interface and LoggerPro for data collection, analysis, and display with one
exception. Various plotted data
sets adjacent illustrate typical behavior of the oscillators.
Notes
My intention was qualitative only,
though one may compare, for example, the measured period and that calculated
from the mass (Plate 3. 0.66 kg) and a spring constant of 243 N/m. See plate seven.
The fits shown in plate three
reveal a likely, and expected, small proportion of Coulomb damping in addition
to viscous, as shown by the better fit.
In addition, as noted, the oscillator is not strictly linear, but a very
slightly hardening one. Plate four
shows the expected period change due to hard repulsion, and also suggests a
dissipation mixture. To obtain the
triple fits in plates five and six I exported the data to Kaleidograph, which
is not limited to five fitting coefficients. I used a Vernier force probe to collect the data displayed
in plate seven. Plate nine shows
the algorithms I used for spring oscillator modeling with a resulting
graph.
Conclusion
By stealing from the Freshman Lab.
and simple addition and modification, I think, one may create apparatus
suitable for an interesting study of oscillators at the intermediate lab.
level.
Further
I intend to add turbulent damping
to an oscillator and numerically model it, and to find the bugs in my coulomb
and magnetic restoring force algorithms.
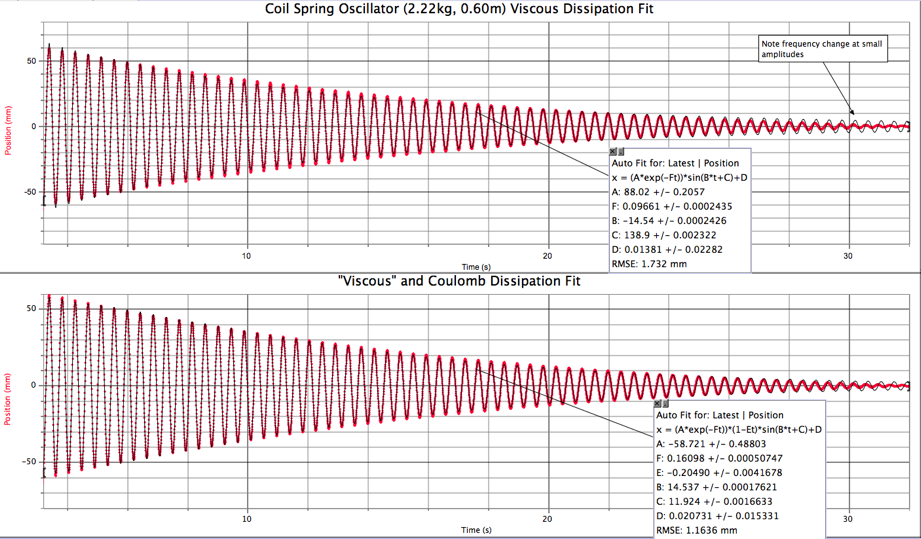
Plate Three, Spring Oscillator
with Two fits
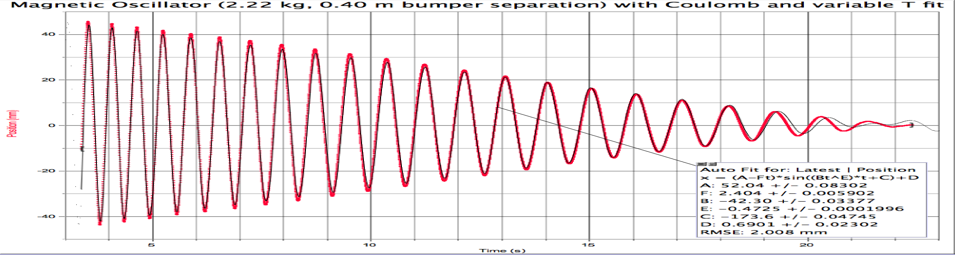
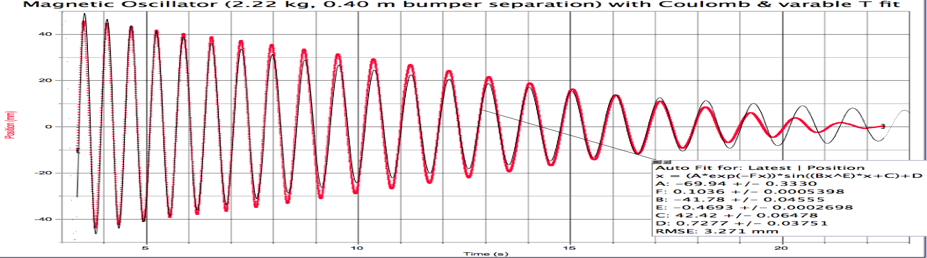
Plate Four, Magnetic Oscillator
with Two fits
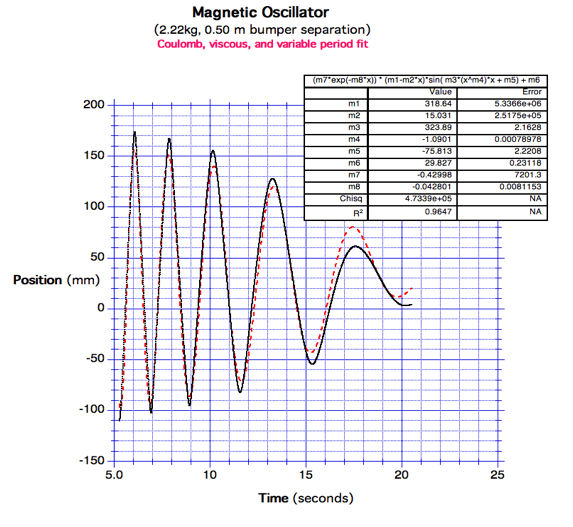
Plate Five, Magnetic Oscillator
with Triple Fit
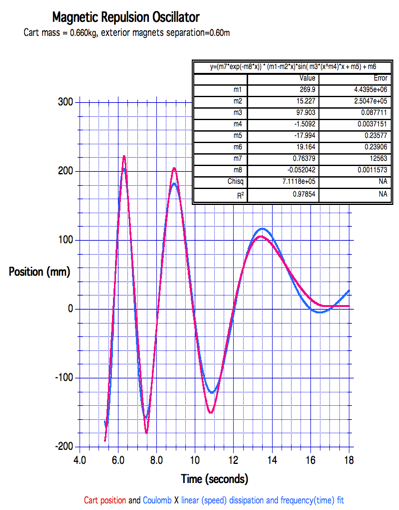
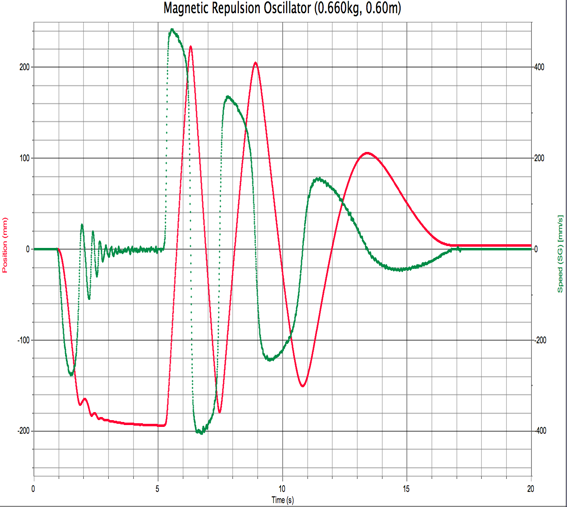
Plate Six, Magnetic Oscillator
Position(time) and Speed
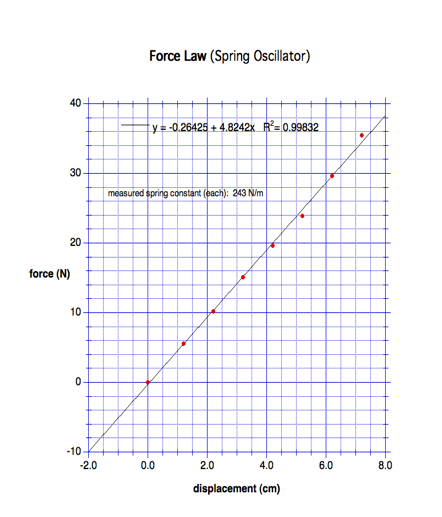
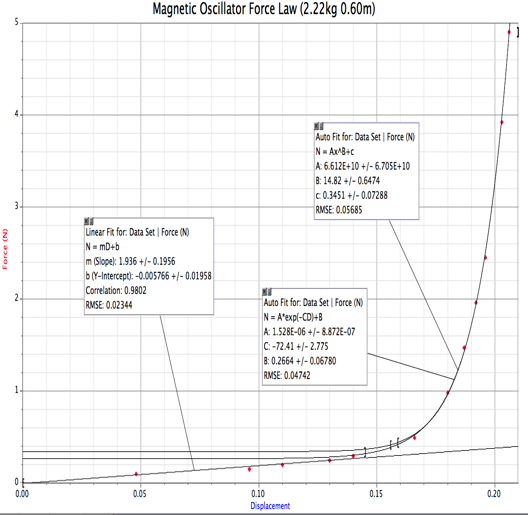
Plate Seven, Spring and Magnetic
Restoring Forces
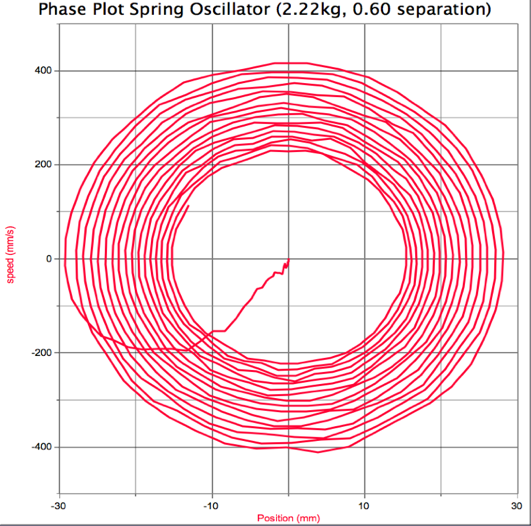
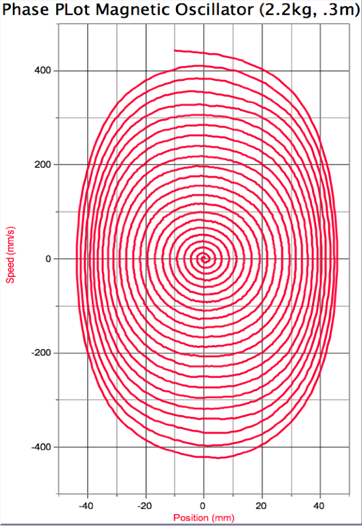
Plate Eight, Phase Plots
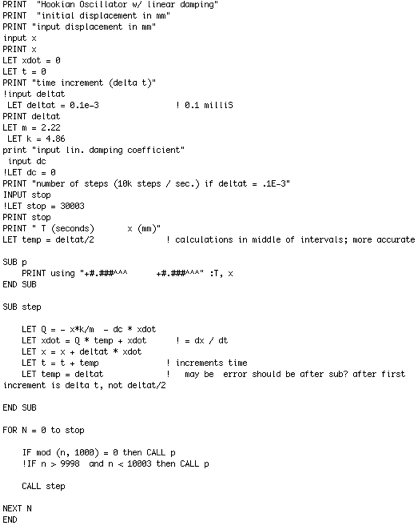
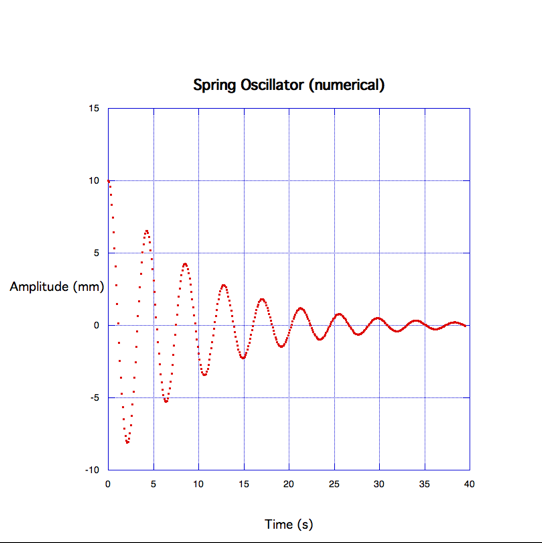
Plate Nine, Leapfrog Algorithm and
Example Plot